

设备概述:
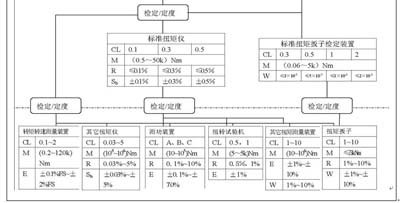
根据中华人民共和国国家计量检定系统表《JJG2047-2006 扭矩计量器具》,国家扭矩计量器具检定系统见下图所示。
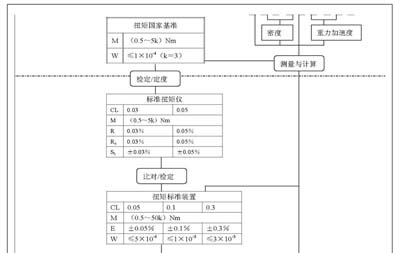
扭矩国家基准主要承担扭矩量值的复现、保存、传递和溯源的工作,是统一全国扭矩量值的最高依据。根据我国目前情况,万测提供50Nm 、1000Nm 和5000Nm 三台静重式扭矩基准机组成,完成在0.5Nm~5000Nm 范围内向基准或相应等级的标准器进行溯源的能力。
静重式扭矩标准机是以砝码的重力作为标准负荷,通过力臂杠杆的作用产生标准力矩,借助适当的机构按预定顺序自动、平稳、准确地把作用力矩和平衡力矩施加到被检/校扭矩仪上的扭矩标准机。这种扭矩机的计量学性能取决于砝码质量、杠杆长度、安装地点的重力加速度、砝码材料和空气密度的测量不确定度以及砝码的加卸方式、机械结构、质量稳定度、杠杆的材料、构造、支撑结构、水平控制程度,还有同轴度、加工工艺、安装质量等密切相关。
目前万测已经完成的静重式扭矩标准机的扭矩值范围为(0.5~5000)Nm,准确度级别分别为0.03 级、0.05 级和0.1 级,扭矩值相对扩展不确定度W 为3×10-4、5×10-4 ,1×10-3 ,其置信因子k=2 。这种机器不确定度的影响因素与扭矩基准机相同,一般用相应准确度等级的标准扭矩仪对其进行检定,或用高准确度和稳定度的标准扭矩仪同基准机进行量值比对,比对结果用归一化偏差En 评定。若En 小于1,则可以认定两台扭矩机的一致性在其不确定度的允许范围内。
技术原理:
机器主要由杠杆系统、砝码加载系统、力矩平衡装置、电气控制系统和软件部分组成。杠杆与被检测件相连,由加挂的砝码对被检测件加载,达到加载力矩的目的。杠杆系统是整个机器中的关键部分。其力臂值的精度直接影响力矩值的测量精度。其支承所产生的磨擦也影响力矩值的精度。对整个机器的不确定度有直接的影响。在测试时杠杆须保持处于水平和平衡。杠杆的静平衡点能进行调整,由三个平衡锤来进行调整,分别为三个坐标方向。通过调整平衡锤可使整个杠杆系统的重心与杠杆中心刀刃准确重合,这样在即时增加很微小的负荷,也能使杠杆产生反应,杠杆的灵敏度可以很高。支承采用高强度、硬度和韧性等性能的合金钢制作。采用天平方式的刀刃和刀承的结构,可以使刀刃和刀承的接触基本是线接触,这样摩擦力可以很小。杠杆有水平位置的锁紧装置,在加载过程中,杠杆须锁紧在水平位置,保证加载时各点的力矩值的平稳改变。在装夹工件过程时,杠杆保持在水平平衡位置不变。锁紧装置位于杠杆的一端,由电机驱动一根双向螺杆旋转,使两夹头作相对方向的运动,达到将杠杆的一端夹紧和松开的目的。
为了保障杠杆工作稳定、可靠,杠杆附加了轴向锁紧的装置。杠杆在装夹工件过程时,杠杆应保持在水平平衡位置不变。一是起到保护杠杆支承的作用,避免了装夹时损伤刀口。二是可以避免因装夹时,杠杆位置的变化的影响,使不确定度减低。轴向锁紧装置位于杠杆的中段,由电机通过行星齿轮,再通过双向螺杆,使两对夹头在杠杆两轴向端面及杠杆中心的两面同时对杠杆进行夹紧。
砝码用于产生静力矩。检测时通过加载不同数量的砝码,来实现不同的力矩值。砝码采用套接式砝码结构,砝码间无吊钩等零件,加载时附加影响小,使加载力值更准确,加载时平稳。砝码采取大小砝码分成两组,传动系统分开,结构简单,维修方便。砝码加载系统的工作原理升降电机通过减速机和齿型带传动,驱动升降丝杠,使砝码托盘下降,使砝码逐个吊挂在杠杆上。砝码的位置通过控制升降电机的旋转达到目的,升降电机的旋转角度是通过光电编码器来进行测量,光电编码器的分度值可达2500线/转。这样可保证砝码位置的准确可靠。
力矩平衡装置的组成由交流伺服电机、伺服控制器、蜗杆减速机等组成。力矩的平衡由测控系统接受杠杆系统电涡流位移传感器的信号后,控制交流伺服电机运行,通过减速机的传动使工件往偏斜的相反方向旋转,保持杠杆在水平平衡位置。
传动采用蜗杆减速机和同步齿形带传动,保证了传动的准确可靠,且噪音小,运行平稳。
技术优势:
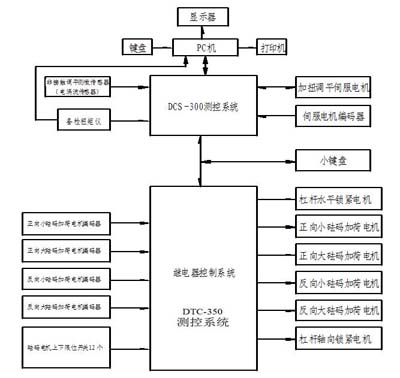
1、DTC-350电气系统
基于DSP技术的试验机数字闭环控制与测量系统,该系统是万测公司引进国际最先进技术,自主研制开发的试验机新型电气控制系统,具有全数字闭环控制、多通道采集等功能。该系统功能强大,数据处理准确,操作简单,使用维护方便。
DTC-350全数字闭环测控系统具有许多先进的特性和技术创新,主要体现在:
采用高速DSP平台,具有高集成度、强大的控制、数据处理能力、高可靠性的优点,是采用其它处理器的试验机所无法比拟的。
数据采集系统由8路高精准24位A/D转换通道组成。最高可达±1000000码,分辨率达1/350000,全程不分档。A/D转换速度和增益可在线编程。3路光电编码器位置捕获系统,允许正交码脉冲频率可高达5MHz,具有纠错、辨向、计数等功能。采用内部放大的A/D芯片,减少了外部放大电路,有效降低了信号的噪音和干扰。
USB通讯,通讯速率为12Mb/s,采用全速模式,批量传输方式。DTC-350也采用了USB通讯,具有12Mb/s通讯速率,其具有的硬件校验、硬件应答等功能,确保了设备高度可靠的工作。
2、继电器控制系统
基于高速、高可靠、宽电压、超强抗干扰的单片机控制系统。具有12个限位开关量的采集功能。具有10个无触点固态继电器驱动的驱动接口,两个触点继电器的驱动接口。四路光电编码器位置捕获通道。一路通讯接口。
3、独特的电涡流传感器
当对工件加力矩时,杠杆所产生的偏斜由电涡流位移计测得。然后通过测控系统控制伺服电机控制器,控制伺服电机作反向运动,使杠杆回到平衡位置。
电涡流式传感器是利用电涡流效应进行工作的。由于结构简单、灵敏度高、频响范围宽、不受油污等介质的影响,并能进行非接触测量,适用范围广。目前,这种传感器已广泛用来测量位移、振动、厚度、转速、温度、硬度等参数,以及用于无损探伤领域。
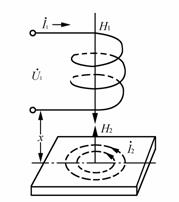
电涡流式传感器的基本原理
如图所示,有一通以交变电流 的传感器线圈。由于电流 的存在,线圈周围就产生一个交变磁场H1。若被测导体置于该磁场范围内,导体内便产生电涡流 , 也将产生一个新磁场H2,H2与H1方向相反,力图削弱原磁场H1,从而导致线圈的电感、阻抗和品质因数发生变化。这些参数变化与导体的几何形状、电导率、磁导率、线圈的几何参数、电流的频率以及线圈到被测导体间的距离有关。
如果控制上述参数中一个参数改变,其余皆不变,就能构成测量该参数的传感器。电涡流式传感器的主要用途之一是可用来测量金属件的静态或动态位移,最大量程达数百毫米,分辨率为0.1%。目前电涡流位移传感器的分辨力最高已做到0.05μm(量程0~15μm)。
电涡流传感器由于测量范围宽、反应速度快、可实现非接触测量,因此在扭矩标准机的杠杆水平位置测量采用电涡流传感器测杠杆的偏斜,可以消除用其他方式测量时因摩擦等因素引起产生的附加力矩,因此,使用电涡流传感器,保证了杠杆的灵敏度确实可以得到保障。
4、特有的轴向锁紧装置
因在工件(传感器或其他)在装夹过程时,有时会因为间隙的原因,装夹时需使用较大的力,如果杠杆的轴向不定位,可能会使得刀刃刀口受到非垂直的力或力矩,造成刀口损伤,使摩擦力加大,灵敏度下降,设备的稳定性降低,甚至危及到设备的正常使用。
另外由于刀刃在刀承上转动时,刀的两端不能有摩擦力,必须有间隙,这样装夹时,杠杆位置的变化的影响,增加了测量的不确定度。而轴向锁紧装置具有将杠杆轴向固定的功能,且定位可以准确、可靠,因而极大地改善了测量的不确定度,使得设备更加稳定、可靠的工作。
执行标准:
JJG734《力标准机》、JJG144《标准测力仪》
技术参数:
型号 | DWM503 | DWM104 | DWM604 | DWM105 |
额定负荷 | 5kN | 10kN | 60kN | 100kN |
示值误差 | ±0.01%/±0.02%/±0.03% | |||
示值重复性 | 0.01%/0.015% | |||
工作台水平度 | 0.3/1000 | |||
每级加卸载时间 | <30S | |||
压缩空间(mm) | 280x300 | 300x500 | 400x800 | 500x800 |
外形尺寸(长x宽x高)(mm) | 1000x900x2800 | 1100x1000x2800 | 1200x2000x3100 | 1200x2150x3200 |
设备总重量(kg) | 620 | 1500 | 7500 | 12000 |
该标准机用于力传感器、称重式传感器、测力仪的检测及测试。










































